滾珠絲杆升降機製動器設計摘要:
滾珠絲杆升降機是一種利用蝸輪蝸杆副帶動滾珠絲杠副進行運動的精密升降部件,在工作過程中主要依靠蝸杆副的自鎖實現鎖定,但是在實際運用中出現過鎖定失效的狀況,說明蝸輪蝸杆自鎖性並不十分可靠。針對此問題,設計了一種簡單靈活的製動結構,並對製動結構的摩擦力矩進行了計算校核計算結果滿足設計要求。
滾珠絲杆升降機簡介:
滾珠絲杆升降機是一種利用蝸杆副帶動滾珠 絲杠副進行升降的精密起重部件,具有傳動效率 蘺、體積小、控製方便、運動平穩導 點,廣泛 應用於舞台升降、奮達天線座升降機構、火箭、 火炮發射裝置以及建築醫療等領域。滾珠絲杆升 降機在工作過程中主要利用滾珠絲杠副進行升降,滾珠絲杠副不具備自鎖功能,用於垂直升降 傳動係統時,^翼失去動力源,就會產生逆轉動,所以滾珠絲杆升降機利用具有自鎖性的蝸杆 副實現鎖定,以防止升降物品時絲杠下落。
蝸輪蝸杆傳動,當蝸杆的螺旋升角y小於摩擦角少時(y <少),該機構具有很好的自鎖 性[121,但是在實際例子中,也出現過因自鎖失 效而導致事故發生的例由此可見,蝸輪 蝸杆自鎖性並不十分可靠,在對安全性、可靠性 要求較高的使用場合,滾珠絲杆升降機必須外加 製動裝置#以確保安全,因此對滾珠絲杆升降機 設計一種結構筒單、使用方便、價格低廉的製動結構很有必要。文中選用JWB005型號的升降機 進行製動結構設計。
1製動結構設計計算
如Mi所示,滾珠絲杆升降機主要有蝸輪蝸 杆減速器、滾珠絲杠副、推力球軸承、防旋轉罩 及底座等零部件組成其工作原埋為伺服電機帶 動蝸杆8旋轉,蝸杆8帶動蝸輪3轉動,蝸輪3 通過蝸輪軸帶動絲杠螺母9旋轉,絲杠螺母9帶 動滾珠絲杠10雇下運動,滾珠絲杠10通過法蘭 1實現物體的升降。為了防止滾珠絲.杠10在上 下運動過程中旋轉,在其 下端裝有方形塊6, 方形塊沒黴防旋轉罩5之間間隙配合,從而實現 滾珠絲杠庚能上下運動而不能旋轉運動a
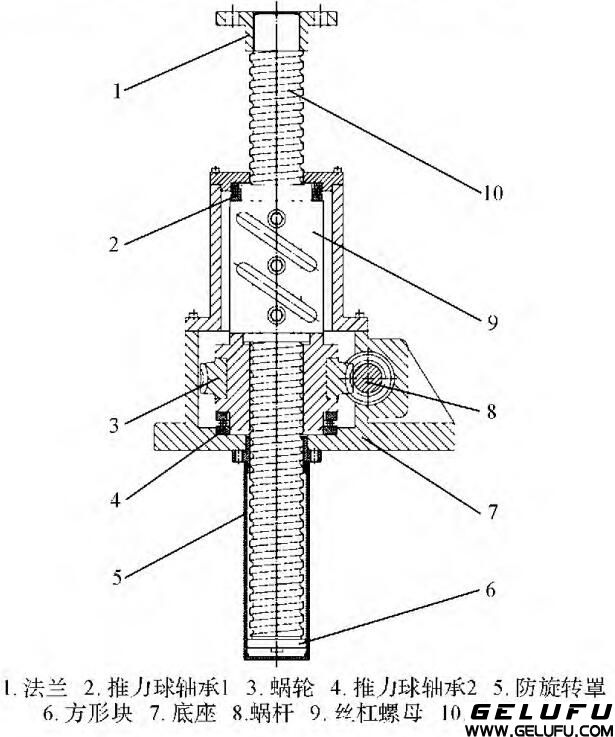
1.法蘭2.推力球軸承1 3.蝸輪4.推力球軸承2 5.防旋轉罩 6.方形塊7.底座8.蝸杆9.絲杠螺母10.滾珠絲杠
1.2製動結構的組成及工作原理
滾珠絲杆升降機製動結構簡圏如圖2所示。 整個製動結構主要有梯形絲杆、禪形絲杆螺母、 摩檫片支架、角接觸球軸承、組合蝶形彈簧及摩 擦片等組成。其工作原理為減速電機帶動梯形絲 杆1、1-1做旋轉運動,梯形絲杆帶動梯形鏠杆 螺母3、34做JTF移動,梯形絲杆螺母和摩擦 片支架6之間用.銷軸連接,當螺母3、3-1向下 運動時,它們向下推摩擦片支架,組合碟形彈簧 7被班縮,摩擦片8和9分開,製動鬆閘;當螺 母3、3-1向上運動時,它們和摩擦片支架分開, 摩擦片支架在組合碟形彈簧的作用下向上運動,摩擦片8和9接觸壓紫,蝸輪和絲杠螺母被製 動,即絲杠螺母不能逆旋轉,從而滾珠絲杠不能 上下移動,實現滾珠絲杆升降機製動。
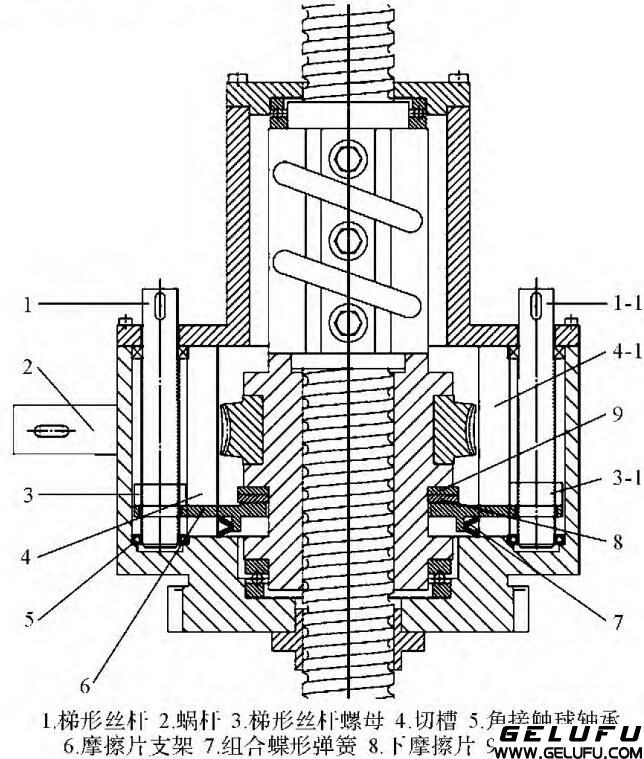
靈摩擦片8將製動力矩傳給摩擦片支架時, 摩擦片支架的兩個臂和底痤切槽4、4-1接觸, 阻止摩擦片8的轉動,從而實現製動。滾珠絲杆 升降機詡於精密升降場合,當物體快接近預定位 董時,接近開關燈亮,伺服電機迅速減速,此時 蝸輪轉速極低,物體緩慢逼近預定位置,當物體 到達預定位置時,蝸輪停止轉動,故製動時兩摩 擦片之間的相對轉速很低,對摩擦片支架的衝擊 也就很小,,不需要加緩衝彈簧,.如果衝擊銀大, 則需要在摩擦片支架的側麵加緩衝彈簧,以減少 對底座.的衝亀?
1.3摩擦力矩計算校核
(1)由參考文獻[5]可知.當滾珠這枉副受 軸向載荷作用時,ft滾珠絲杠公_直徑4處 產生螺紋力矩軋,在絲杠螺母無預緊及忽略軸 承的摩擦力矩情況下,螺紋力矩風等於其驅動 力矩M,即
M=Mt=FaUn((p+Pd)^-=^ (1)
式中,圪為軸向外載荷:N; i為絲杠導程, mill;妒為螺紋升梟v (嚴),為當 量摩擦角,一般取ft =8.6'; r?為傳動效率,r?
_ tan^> tan(^) +pd) °
(2):德摩擦片8和9之間產生相對轉動時, 接觸麵間將戶秦摩擦力,摩擦力對回轉軸線的力 矩即為摩擦力矩財^。如圖3所在摩擦片接 觸麵±取環形微麵積山=2耶如,則環形微麵積 上所受的正壓力為ipcMp為環形微麵積名. 的壓強),摩擦力為d^V z/d^t/pcb (/為摩擦片 摩擦係數),對回轉軸線的摩擦力矩dM, =pdF> =成d.s,故摩擦片端麵所受的總摩擦力矩為
Mf = /f pfpds = 2tt/Jf pp2dp (2)



